KIMM開發適用于機器人和可穿戴設備的實時多模態觸覺檢測系統
觸覺感知系統能夠為機器人和可穿戴設備等需要實時觸覺數據的物體提供類似人類的多模式觸覺信息。
韓國機械材料研究院納米融合制造系統研究部研究主任 Hyuneui Lim 和自然啟發系統與應用系原理研究員 Youngdo Jung 領導的研究團隊(會長 Seog-hyeon Ryu,以下簡稱科學和信息通信部下屬的研究所(簡稱“KIMM”)受人類觸覺感知的啟發,開發了一種實時、多模態觸覺感知系統,能夠實時提供多觸覺信息,并宣布該研究成果發表在著名期刊《Soft Robotics》上。” (IF: 7.9) *
*出版物名稱:用于觸覺刺激實時和多模態檢測的人類啟發觸覺感知系統(出版日期:2023 年 12 月 19 日)
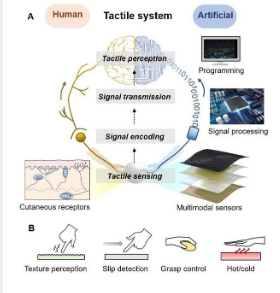
研究團隊通過模仿人體皮膚多種感覺受體感知各類觸覺信息并實時傳輸至大腦的原理,開發了一種實時、多模態的觸覺檢測系統。該系統由四個三維堆疊的觸覺傳感器、信號處理/傳輸模塊和分析模塊組成。該系統成功區分了各種類型的觸覺刺激和表面紋理,并進一步實時區分了復雜的運動。
四種類型的觸覺傳感器,每種都檢測溫度、振動、剪切力和垂直壓力,基于三維(3D)柔性電極印刷工藝技術層疊在三維結構中。同時,這些傳感器與電子模塊的FPCB(柔性印刷電路板)連接,進行信號處理和傳輸,從而通過相應的FPCB連接端子輕松傳輸信號處理后的觸覺信息。
在之前的研究中,需要復雜的外部測量設備和分析設備來檢測相應設備產生的信號,從而可以檢測到各種形式的觸覺刺激。因此,很難將這些設備以簡單的獨立系統的形式應用于可穿戴設備或機器人。
另一方面,在新開發的多模態觸覺感知系統中,多種類型的觸覺傳感器以三維結構垂直排列。此外,還開發了能夠轉換、傳輸和分析信號的模塊,使得系統能夠以緊湊而簡單的形式實現,并使其適用于實際的機器人和可穿戴設備。
KIMM 研究總監 Hyuneui Lim 表示:“通過模仿人類的感覺系統,實時多模態觸覺感知系統能夠同時感知多種感官。而且,該技術解決了使用傳統傳感器時復雜且龐大的信號處理和檢測系統可能引起的問題。” 她補充道:“通過將該系統應用到機器人或可穿戴設備上,我們將能夠獲得大量多樣且復雜的觸覺信號信息,這有望為改善公共福利和安全做出貢獻。”
免責聲明:本答案或內容為用戶上傳,不代表本網觀點。其原創性以及文中陳述文字和內容未經本站證實,對本文以及其中全部或者部分內容、文字的真實性、完整性、及時性本站不作任何保證或承諾,請讀者僅作參考,并請自行核實相關內容。 如遇侵權請及時聯系本站刪除。